永磁同步电机的三种扭矩估算算法
前 言
主驱电机是电动汽车核心的部件之一,主要作用是产生驱动扭矩或制动扭矩,驱动车辆前进并进行动能回收。主驱电机系统一旦发生故障,可能导致车辆失控、高压泄露等严重后果,直接威胁车内乘客和车外行人的生命安全。因此,主驱电机的功能安全设计是电动汽车实现安全运行的重要一环。2023年11月27号,国标委发布了《GB/T 43254电动汽车用驱动电机系统功能安全要求及试验方法》,对主驱电机系统的功能安全要求和功能安全验证、确认方法进行了规定,从标准层面推动主驱电机系统的功能安全落地。
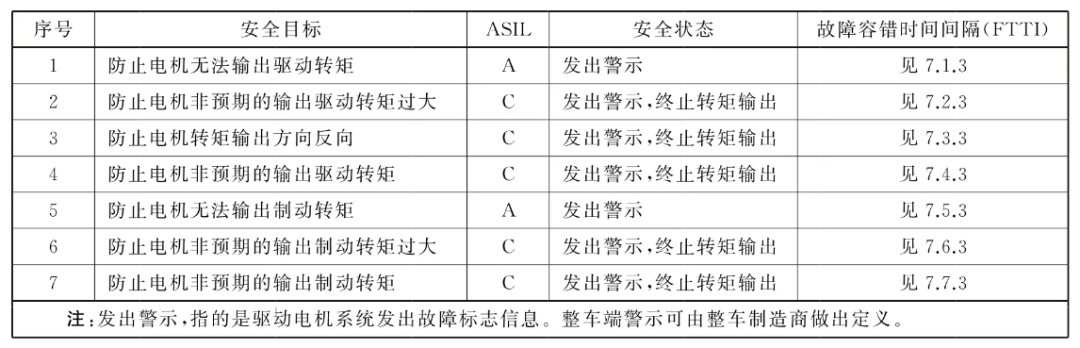
GB/T 43254-2023规定的主驱电机系统的安全目标
从标准中可以看到,扭矩安全是主驱电机系统功能安全的重要组成部分。扭矩安全需要监控主驱电机的实际输出扭矩,防止主驱电机非预期输出扭矩,以及输出扭矩过大或者反向等故障。在主驱电机系统的运行过程中,需要实时估算电机的实际输出扭矩,并比较其与请求扭矩之间的差值。因此,扭矩估算算法也成为主驱电机扭矩安全的重点。
目前常用的扭矩估算算法有三种,分别是:电流法、功率法和查表法。下面以永磁同步电机为例,分别介绍三种算法及其优缺点。
01电流法
电流法是采用定子电流估算永磁同步电机的输出扭矩,计算公式如式(1)所示。
te:估算扭矩
P0:电机极对数,电机参数
ψf:转子磁链,电机参数
Ld、Lq:定子d轴同步电感、q轴同步电感,电机参数
ids、iqs:定子d轴电流、定子q轴电流。变量,定子三相电流(IA、IB、IC)经过Clark变换和Park变换得到
优点:标定工作量小,需要的信号少,仅需要定子三相电流(IA、IB、IC)和旋变信号(用于计算转子磁链方向,进行Park变换)。
缺点:依赖于准确的电机参数,有时不容易得到。
式(1)计算的是电机产生的扭矩,如果需要得到电机输出轴上的扭矩,还需要考虑由于风阻、摩擦因素造成的摩擦损耗。
02功率法
功率法是采用定子三相电流、定子三相电压计算电机消耗的功率,再除以电机的机械转速得到电机的扭矩,计算公式如式(2)所示。
te:估算扭矩
UA、UB、UC:定子三相电压。变量,采用直流母线电压和三相占空比重构得到
IA、IB、IC:定子三相电流。变量,电流传感器采样
ωr:电机机械转速。变量,基于旋变信号计算得到
优点:标定工作量小,而且不依赖于电机参数。
缺点:需要的信号多,需要同时采样母线电压、三相电流、三相占空比、旋变信号。在低转速下,反电动势小,三相电压计算误差大,造成功率法扭矩估算精度下降。
UAIA+UBIB+UCIC计算的是电机的输出功率,如果要想得到电机输出轴上的扭矩,需要考虑电机本身的铁损、铜损和摩擦损耗。
03查表法
查表法是直接在测功机上标定定子d轴电流ids、q轴电流iqs和电机输出扭矩之间的对应关系,得到(ids、iqs)与输出扭矩之间的映射关系。在电机运行过程中,通过查表得到电机的输出扭矩。
te:估算扭矩
ids、iqs:定子d轴电流、定子q轴电流
优点:不依赖于电机参数。
缺点:标定工作量大,不同工况下,误差相对较大。
电流法、功率法、查表法三种扭矩估算算法,各有自身的优点和局限,也可以通过组合应用,提高扭矩估算的精度。在实际项目中,我们可以根据拥有的资源和条件进行选择,也可以在满足精度要求的基础上,选择成本低、工作量小的方法。功能安全开发的挑战就在于,在确保安全、满足需求的前提下,平衡好工程落地的难度和成本。


