“电子皮肤”,人形机器人的柔性触觉传感器
电子发烧友网报道(文/黄晶晶)电子皮肤是一种新型的柔性可穿戴传感器,能够模仿人类皮肤感知功能,具有轻薄、柔软、灵活等特点,可将外界刺激转化为不同的输出信号,在智慧医疗、人机交互、虚拟现实和AI等领域具有广阔的应用前景。
电子皮肤的核心技术在于其柔性触觉传感器。这种传感器采用阵列式设计,涵盖了压阻式、电容式、压电式等多种技术原理。其基底材料通常选用聚二甲基硅氧烷PDMS或聚乙烯醇PVA等柔性物质,而敏感材料则包括碳纳米管、石墨烯以及导电聚合物等。这些材料具有良好的柔韧性和弹性,能够适应机器人的各种动作和形变。电子皮肤不仅能够感知压力,还可以检测温度、湿度等多种物理量。多类型感知功能使得机器人能够更全面地了解周围环境,从而做出更合理的决策。
汉威科技
汉威科技在国内最早布局柔性触觉传感器,已深耕多年并取得了显著成果。该集团不仅建立了稳固的纳米敏感材料体系,还突破了柔性压阻、压电、电容以及汗液检测等四大核心技术的瓶颈,积累了包括大面积阵列设计、敏感材料与导电墨水的合成制备,以及大面积印刷电子的批量生产在内的多项核心能力。目前,集团拥有多条柔性传感器生产线,年产能高达千万支。
汉威科技表示,柔性触觉传感器被誉为“电子皮肤”,具备高灵敏度、强柔韧性、低能耗、小巧纤薄等特点,可贴附于各种复杂曲面,如具身智能机器人灵巧手、智能座舱座椅,检测压力、温度等指标,在医疗健康、仓储物流、汽车电子等领域有广阔应用前景。
图源:汉威科技
汉威柔性触觉传感器轻薄至极,其厚度仅约0.3mm,轻如3张A4纸,更兼具出色的柔韧性。即便经过100万次的反复弯曲,它依旧能保持正常工作状态。其传感点密度极高,每平方厘米可集成多达100个传感点,为高分辨率检测提供了有力支持。同时,它对微小力度的反应极为灵敏,甚至能精准捕捉到羽毛轻轻拂过的力度变化。此外,响应速度极快,从接触到响应只需不到1毫秒。更为灵活的是,它可根据终端产品的需求进行剪裁,以满足个性化的设计要求。
目前,汉威科技集团正与多家机器人公司携手合作,将这款柔性触觉传感器巧妙地融入机器人灵巧手的各个部位,从而为机器人执行复杂精细的动作提供了重要的感知基础。
4月1日汉威科技表示,公司在柔性传感器领域已有十多年的研究和布局,尤其是在电子皮肤的研发上处于行业领先地位,早在2014年就研发出了电子皮肤。为了让更多机器人本体能够用上电子皮肤,公司推出了两款标准化产品,这样既能满足用户降低成本的需求,也方便机器人本体大量应用。此外,公司判断柔性触觉传感器将是一个增量应用,未来技术将实现更多部位和场景的应用,甚至有望在家庭端机器人时代实现全身覆盖,能够多模态感知周边环境,并且触感会更好,具备多模态感知等特性。公司正在跟踪并储备这些变化。
途见科技
途见科技专注于可拉伸多模态柔性电子皮肤触觉芯片的研制以及具身智能触觉感知大数据模型的开发,相关产品广泛应用于具身智能、智能座舱、智能穿戴及医疗健康等领域,并已与多家上市公司及龙头企业开展战略合作。
公司研制的柔性电子皮肤产品具有高密度、高灵敏度、宽量程、信号稳定、抗干扰能力强等卓越性能,良好的柔性延展性使其易于贴覆在异形不可展表面,不挤占内部空间,精确测量第一接触面的触觉信息,并可大面积扩展,其中多项技术为世界首创。据介绍,该电子皮肤的厚度最薄能做到100微米。
图:途见科技展示的柔性电子皮肤产品 电子发烧友网拍摄
同时,公司为客户提供基于柔性电子皮肤产品的全套触觉解决方案,公司开发的触觉感知系统覆盖从处理到反馈控制的全链条功能,可为具身智能触觉大数据模型开发提供技术支撑。
途见科技的具身智能触觉手套集成多模态柔性电子皮肤技术,实时采集压力、温度、切应力等触觉信息,为触觉大模型提供精准的数据输入,高精度和灵敏度的传感阵列增强模型赋予手套智能交互能力,提升数据采集效率,在具身智能机器人及其他触觉大模型场景应用广泛。
图:途见科技与兆威机电合作搭载电子皮肤的机器人灵巧手 电子发烧友网拍摄
申昊科技
3月3日申昊科技披露投资者关系活动记录表显示,公司柔性触觉传感器目前主要应用于非接触避障需求,已小批量应用于操作类机器人,以避免机器人在执行过程中对人或设备的碰撞,保护作业安全。目前该电子皮肤传感器仍处于小批量试用阶段。
奥迪威
4月1日奥迪威发布投资者关系活动记录表,柔性传感器也称作“电子皮肤”,是公司新技术发展路线之一,柔性传感器作为物联网的感知层的数据采集核心部件,获取人与物、物与物的交互数字、信号采集与反馈,在触控、压感、压力、温度等应用具有很好的性能表现。
目前,该产品已在市场发布并安装于精密力控机械手中,实现随机柔性抓取和感知捕捉物品的各项特性。除了工业领域,柔性传感器还可以应用于服务机器人、智能穿戴设备、运动训练及康复等场景。目前在调试阶段,尚未取得机器人厂商的量产订单。
墨现科技
墨现科技一直专注于触觉传感器领域为各种应用场景提供高适应性柔性压力传感器解决方案。据介绍,墨现科技研发的电子皮肤技术,不仅能够完美贴合机械结构,还能在整只手上布置超过1000个以上感应点,极大地提升了机器人对物体形状和压力的感知能力。电子皮肤不仅能够覆盖手掌和手背,还能适配机械臂的复杂多曲面结构,包括关节处。这种柔韧性和贴合能力使得电子皮肤能够完美融入机器人的机械结构中。
截至2025年2月,在人形机器人场景上,已经有数家头部企业在灵巧手上标配了墨现科技的电子皮肤。同时,还有更多企业的方案还在定制中。
图:墨现科技产品展示 电子发烧友网拍摄
埔慧科技
微结构型柔性触觉传感器模仿人类皮肤,借助尺度表面微结构实现微小压力的超灵敏感知,微结构柔性触觉传感器主要由微结构基底、导电涂层、采集电极、封装层组成,微结构柔性触觉传感器为压阻响应原理,具有表面微结构的材料在受压时发生形变,改变导电层与电极间接触面积以及接触电阻,进而关联压力-电学信号,实现触觉感知功能。
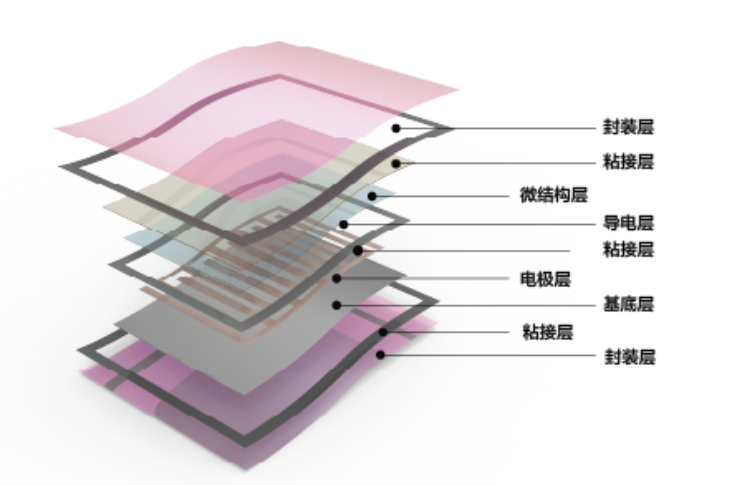
图源:埔慧科技
埔慧科技围绕新型微结构柔性触觉传感器技术,在广东粤港澳大湾区黄埔材料研究院成果转化的支持下,突破新型柔性传感器材料、设计、制造、封装、测试和应用等技术瓶颈,实现新型微结构传感器的批量化生产和产业化应用。先后攻克了表面微结构宏观尺度成型方法、导电材料力电耦合界面调控、传感器多尺度结构性能关联,致力于成为微结构型柔性触觉传感器行业领军企业。
PXS系列压力分布检测系统,基于微结构型柔性触觉传感器核心技术集成自主研发高密度传感器阵列、大通量数据采集器以及多功能界面交互软件,具有高灵敏、宽量程、高稳定、测试精准、大通量等优势,支持测试传感器与软件功能个性化定制,可满足多场景界面压力分布静态与动态变化测试需求。
小结:
当前灵巧手设计是人形机器人研发最为关键的环节之一,可以看到电子皮肤已经在灵巧手的手指、手掌等位置进行测试,未来可能覆盖更多部位。皮肤是人类最大的感觉器官,感知到冷热、软硬、压感等等让大脑指挥人体做出相应动作。若要人形机器人更像人,不仅是大脑的智能,电子皮肤必定是感知的关键所在。随着电子皮肤技术以及生产工艺的成熟,未来几年内有望迎来产业爆发。


